Class 18: Dynamics on Networks 3 — Agent-Based Models#
Goal of today’s class:
Extend notion of dynamics on networks to agent-based models
Introduce voter model and Schelling model
Explore ABMs on your own
Come in. Sit down. Open Teams.
Make sure your notebook from last class is saved.
Open up the Jupyter Lab server.
Open up the Jupyter Lab terminal.
Activate Conda:
module load anaconda3/2022.05Activate the shared virtual environment:
source activate /courses/PHYS7332.202510/shared/phys7332-env/Run
python3 git_fixer2.pyGithub:
git status (figure out what files have changed)
git add … (add the file that you changed, aka the
_MODIFIEDone(s))git commit -m “your changes”
git push origin main
import networkx as nx
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
from matplotlib import rc
rc('axes', axisbelow=True)
rc('axes', fc='w')
rc('figure', fc='w')
rc('savefig', fc='w')
Introduction to Agent-Based Models (ABMs)#
Agent-Based Models (ABMs) are tools for exploring how individual actions and interactions can create large-scale, macroscopic phenomena. These “agents”—whether they’re people, animals, cells, or even abstract entities—follow simple rules that dictate how they behave and interact within a specific environment. By modeling these behaviors, we can uncover how larger trends and phenomena emerge from the ground up. ABMs have applications everywhere: understanding social dynamics, tracking the spread of diseases, modeling economies, studying ecosystems, and even exploring physical systems.
What makes ABMs so fascinating is their ability to show emergence: how complex, unexpected patterns can arise from simple, local interactions. This concept is key for understanding systems that are too complex to tackle with traditional approaches—systems where the whole is much more than the sum of its parts.
In this chapter, we’ll kick off our exploration into ABMs through one of the simplest and most famous examples: Elementary Cellular Automata (ECA). These models, though incredibly basic, highlight the core ideas of emergence and complexity. They’re a great place to start as we work our way toward more advanced agent-based models.
Elementary Cellular Automata as “Agents”#
Cellular automata (CAs) are discrete models composed of cells arranged in a grid, where each cell evolves over time according to a set of simple, local rules. Despite their simplicity, cellular automata demonstrate a wide range of behaviors, from static or periodic structures to chaotic dynamics, depending on the rules governing them. This makes them a natural precursor to more advanced ABMs, as they allow us to:
Isolate Fundamental Principles: By focusing on abstract, rule-based systems, we can explore how local interactions create global patterns without the complexity of real-world data.
Visualize Emergence: Cellular automata are highly visual, making it easy to see the progression of states and the emergence of patterns over time.
Transition to ABMs: The framework of CAs, with their discrete states and local rules, closely parallels the logic underlying ABMs, where agents operate according to simple rules within an environment.
Elementary Cellular Automata: A Foundation for Complexity#
Elementary Cellular Automata (ECA) (Wolfram, 1983) are among the simplest forms of cellular automata. They typically consist of:
A one-dimensional grid of cells, each of which can be in one of two states:
0(inactive) or1(active).A rule that determines the next state of a cell based on its current state and the state of its two immediate neighbors.
Each of the 256 possible rules (numbered from 0 to 255) corresponds to a unique set of dynamics. These rules encode the behavior of the system, and through them, we can observe how complexity emerges from simplicity. For example:
Some rules result in stable or periodic patterns, such as Rule 90, which generates fractal-like structures.
Other rules, such as Rule 110, exhibit chaotic dynamics and even computational universality, meaning they can emulate any Turing machine.
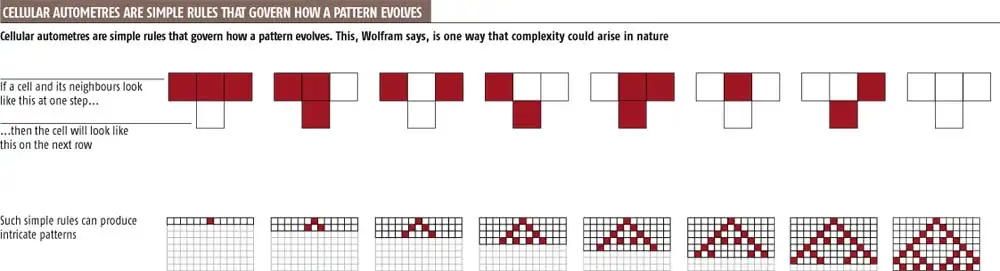
Image credit: New Scientist (2002), “The Book of Revelation” https://www.newscientist.com/article/mg17523506-000-the-book-of-revelation/
Some good references if you want to explore more:
Wolfram, S. (2002). A New Kind of Science. Champaign, IL: Wolfram Media.
Wolfram, S. (1983). Statistical mechanics of cellular automata. Reviews of Modern Physics, 55(3), 601–644. https://doi.org/10.1103/RevModPhys.55.601
Wolfram, S. (1984). Universality and complexity in cellular automata. Physica D: Nonlinear Phenomena, 10(1-2), 1–35. https://doi.org/10.1016/0167-2789(84)90245-8
def rule_to_bin(rule_number):
"""
Converts the rule number (0-255) into an 8-bit binary representation.
Args:
rule_number (int): Rule number (0-255) defining the behavior of the cellular automaton.
Returns:
np.ndarray: An array of 8 binary digits representing the rule.
"""
return np.array([int(x) for x in np.binary_repr(rule_number, width=8)], dtype=int)
def apply_rule(state, rule_bin, p=0):
"""
Applies the rule to compute the next state of the cellular automaton.
Args:
state (np.ndarray): The current state of the automaton as a 1D array.
rule_bin (np.ndarray): The binary representation of the rule.
p (float): Probability of flipping a cell's state (0 to 1 or 1 to 0).
Returns:
np.ndarray: The next state of the automaton as a 1D array.
"""
next_state = np.zeros_like(state) # Initialize the next state
for i in range(1, len(state) - 1): # Exclude boundaries
# Extract the 3-cell neighborhood
neighborhood = state[i-1:i+2]
# Calculate the rule index for the neighborhood
idx = 7 - (neighborhood[0] * 4 + neighborhood[1] * 2 + neighborhood[2])
next_state[i] = rule_bin[idx] # Apply the rule
# Randomly toggle the cell state based on probability p
if np.random.rand() < p:
next_state[i] = 1 - next_state[i]
return next_state
def run_automaton(rule_number, size, steps, initial_state=None, p=0):
"""
Runs the elementary cellular automaton for a given rule number and parameters.
Args:
rule_number (int): The rule number (0-255) to define the automaton's behavior.
size (int): The number of cells in the grid.
steps (int): The number of time steps to simulate.
initial_state (np.ndarray, optional): The initial state of the automaton. Defaults to a single active cell in the center.
p (float): Probability of flipping a cell's state during evolution.
Returns:
np.ndarray: A 2D array where each row represents the state of the automaton at a given time step.
"""
rule_bin = rule_to_bin(rule_number) # Convert rule number to binary
state = np.zeros(size, dtype=int) # Initialize the grid
# Set initial state
if initial_state is None:
state[size // 2] = 1 # Single active cell in the center
else:
state[:len(initial_state)] = initial_state
states = [state.copy()] # Store all states for visualization
# Simulate the automaton over the given number of steps
for _ in range(steps):
state = apply_rule(state, rule_bin, p)
states.append(state.copy())
return np.array(states)
def get_full_rule(neighborhood, rule_bin):
"""
Retrieves the output of the rule for a given neighborhood.
Args:
neighborhood (list): A list representing the 3-cell neighborhood.
rule_bin (np.ndarray): The binary representation of the rule.
Returns:
tuple: The input neighborhood and the corresponding output value.
"""
# Calculate the rule index for the neighborhood
idx = 7 - (neighborhood[0] * 4 + neighborhood[1] * 2 + neighborhood[2])
return neighborhood, rule_bin[idx]
def plot_automaton(states, rule_number):
"""
Plots the evolution of the cellular automaton over time and visualizes the rule.
Args:
states (np.ndarray): A 2D array representing the states of the automaton over time.
rule_number (int): The rule number (0-255) to display in the title.
"""
rules = [[0, 0, 0], [0, 0, 1], [0, 1, 0], [0, 1, 1],
[1, 0, 0], [1, 0, 1], [1, 1, 0], [1, 1, 1]] # All possible neighborhoods
rule_bin = rule_to_bin(rule_number) # Convert rule number to binary
halfway = int((states.shape[1] - 1) / 2 + 1) # Find the halfway point of the grid
if states[:, halfway:].sum() > 0: # Case for wider patterns
fig, ax = plt.subplots(1, 1, figsize=(12, 6), dpi=150)
ax.imshow(states, cmap='binary', aspect='auto')
ax.set_xlabel("Cells")
ax.set_ylabel("Time")
ax.set_title(f"Elementary Cellular Automaton: Rule {rule_number}", x=1.0, ha='right')
ax2 = ax.inset_axes([0.75, 0.75, 0.25, 0.25]) # Add inset for rule visualization
else: # Case for narrower patterns
fig, ax = plt.subplots(1, 1, figsize=(12 / 2, 6), dpi=150)
states = states[:, :halfway-1].copy()
ax.imshow(states, cmap='binary', aspect='auto')
ax.set_xlabel("Cells")
ax.set_ylabel("Time")
ax.set_title(f"Elementary Cellular Automaton: Rule {rule_number}", x=0.0, ha='left')
ax2 = ax.inset_axes([0.0, 0.75, 0.5, 0.25]) # Add inset for rule visualization
# Visualize the rule logic in the inset
gaps = np.linspace(0.045, 1.07, int((len(rules) / 2) + 1))
for ri, r in enumerate(rules):
r, rX = get_full_rule(r, rule_bin)
if ri < 4:
xvals = np.array([gaps[ri]] * 3) + np.array([0, 0.07, 0.14])
ax2.scatter(xvals, [0.8] * 3, marker='s', c=r, ec='.5', vmin=0, vmax=1, cmap='Greys', s=80)
ax2.scatter([xvals[1]], [0.66], marker='s', c=rX, ec='.5', vmin=0, vmax=1, cmap='Greys', s=80)
else:
xvals = np.array([gaps[ri - 4]] * 3) + np.array([0, 0.07, 0.14])
ax2.scatter(xvals, [0.3] * 3, marker='s', c=r, ec='.5', vmin=0, vmax=1, cmap='Greys', s=80)
ax2.scatter([xvals[1]], [0.16], marker='s', c=rX, ec='.5', vmin=0, vmax=1, cmap='Greys', s=80)
ax2.set_xlim([0, 1])
ax2.set_ylim([0, 1])
ax2.set_xticks([])
ax2.set_yticks([])
plt.show()
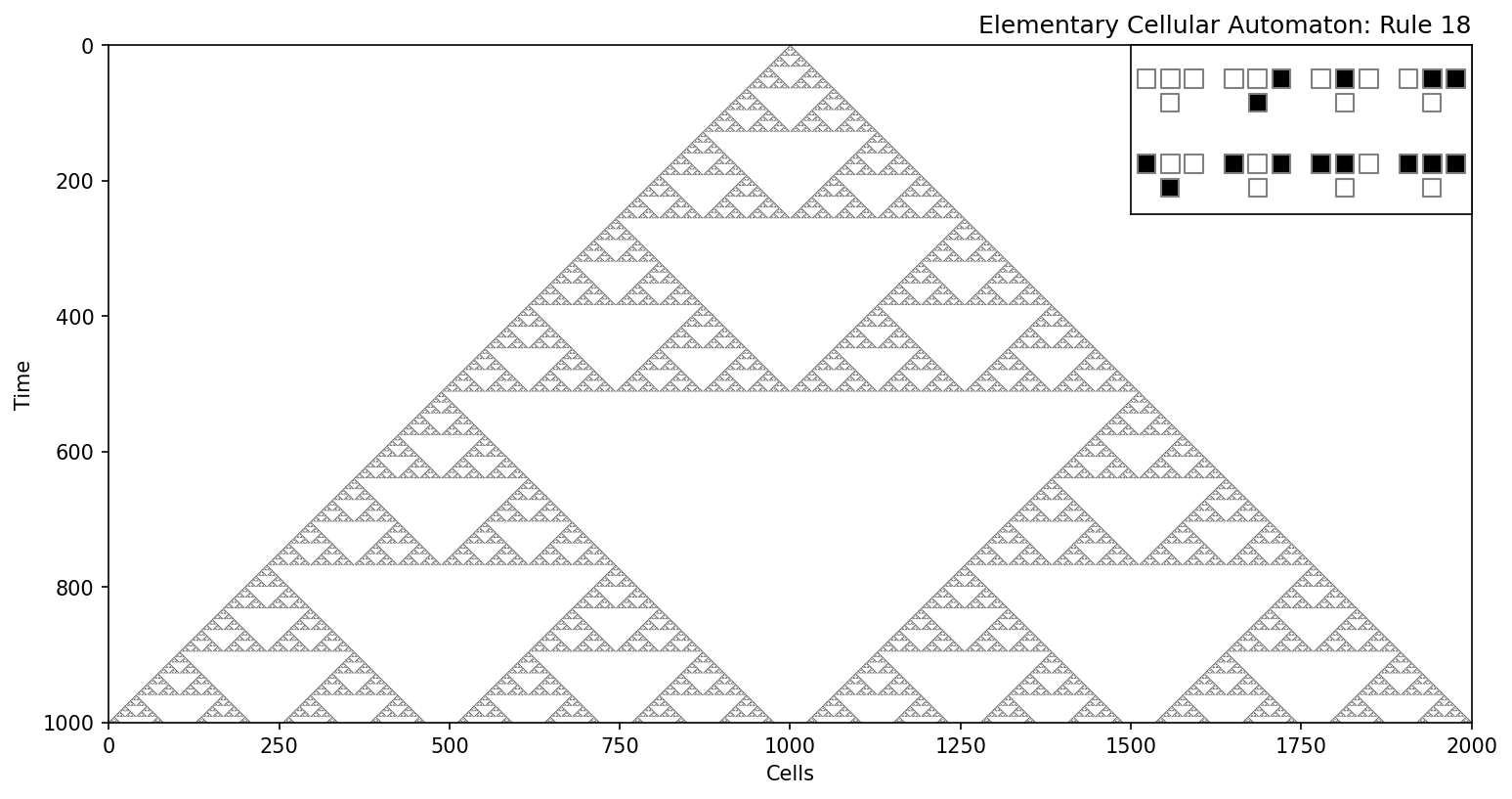
# Example Usage
rule_number = 18 # Choose rule number (0-255)
steps = 1000 # Number of time steps to simulate
size = steps*2+1 # Number of cells in the grid
states = run_automaton(rule_number, size, steps, p=0)
plot_automaton(states, rule_number)
Your turn! Answer the following:#
…wait why are we doing this?
Below, play around with a few different rules. What do you notice? Who can find the most interesting rule?
…why is it interesting?
# # Choose rule number (0-255)
# rule_number = 18
# steps = 500 # Number of time steps to simulate
# size = steps*2+1 # Number of cells in the grid
# states = run_automaton(rule_number, size, steps, p=0.0)
# plot_automaton(states, rule_number)
From Cellular Automata to Agent-Based Models#
ECAs are probably some of the “simplest” examples of ABMs that demonstrate how simple, rule-based systems can produce “complex” phenomena, providing a foundation for extending to more sophisticated ABMs. While ECAs operate on static grids with fixed rules, ABMs in general can feature dynamic agents with richer behaviors, interactions, and adaptive capacities. The transition from ECAs to ABMs involves:
Moving from uniform, grid-based systems to heterogeneous environments (i.e., network structure, dynamic environments, etc.).
Replacing simple state transitions with rule-based decisions made by autonomous agents (i.e., generative models of behavior).
We’ve already seen several examples of ABMs in class so far!
Network growth models can often be cast as an “agentive” process (new nodes “choosing” to add their edges to nodes in the network)
Contagion and diffusion models.
Here’s several more common ABM paradigms frequently applied to networks:
Opinion Dynamics - models that try to capture agents’ opinions evolving through interactions with their neighbors in the network. Agents often update opinions based on averaging, thresholds, or reinforcement (e.g. “Voter” model, “DeGroot” learning model, bounded confidence models, rumor models, etc.)
Game-Theoretic Models - modeling strategic interactions between agents, where an agent’s payoff depends on its own actions and the actions of their neighbors via (usually) repeated interactions (e.g. Prisoner’s dilemma, public goods games, ultimatum games, etc.)
Mobility and Spatial Interaction Models - models agents traversing a spatial network and interacting with their environments (e.g., transportation networks)
Homophily and Social Influence Models - models that show how rewiring in networks can create homophily, feedback loops, and more (e.g. Axelrod’s cultural dissemination model, models of polarizaiton/echo chambers, etc.)
Resource Allocation and Foraging Models - inspired by ants or other optimizing collectives in nature, these models involve agents allocating resources or exploring the network to maximize some payoff function, which often results in tradeoffs between exploration and exploitation.
And many many more, of course!
Some good references:
Clifford, P., & Sudbury, A. (1973). A model for spatial conflict. Biometrika, 60(3), 581–588. https://doi.org/10.1093/biomet/60.3.581
Holley, R. A., & Liggett, T. M. (1975). Ergodic theorems for weakly interacting infinite systems and the voter model. Annals of Probability, 3(4), 643–663. https://doi.org/10.1214/aop/1176996306
DeGroot, M. H. (1974). Reaching a consensus. Journal of the American Statistical Association, 69(345), 118–121. https://doi.org/10.2307/2285509
Hegselmann, R., & Krause, U. (2002). Opinion dynamics and bounded confidence: Models, analysis, and simulation. Journal of Artificial Societies and Social Simulation, 5(3), 1–24. http://jasss.soc.surrey.ac.uk/5/3/2.html
Daley, D. J., & Kendall, D. G. (1965). Stochastic rumours. Journal of the Institute of Mathematics and Its Applications, 1(1), 42–55. https://doi.org/10.1093/imamat/1.1.42
Nowak, M. A., & May, R. M. (1992). Evolutionary games and spatial chaos. Nature, 359(6398), 826–829. https://doi.org/10.1038/359826a0
Santos, F. C., & Pacheco, J. M. (2005). Scale-free networks provide a unifying framework for the emergence of cooperation. Physical Review Letters, 95(9), 098104. https://doi.org/10.1103/PhysRevLett.95.098104
Hardin, G. (1968). The tragedy of the commons. Science, 162(3859), 1243–1248. https://doi.org/10.1126/science.162.3859.1243
Perc, M., & Szolnoki, A. (2010). Coevolutionary games—a mini review. BioSystems, 99(2), 109–125. https://doi.org/10.1016/j.biosystems.2009.10.003
Güth, W., Schmittberger, R., & Schwarze, B. (1982). An experimental analysis of ultimatum bargaining. Journal of Economic Behavior & Organization, 3(4), 367–388. https://doi.org/10.1016/0167-2681(82)90011-7
Barthélemy, M. (2011). Spatial networks. Physics Reports, 499(1-3), 1–101. https://doi.org/10.1016/j.physrep.2010.11.002
Noh, J. D., & Rieger, H. (2004). Random walks on complex networks. Physical Review Letters, 92(11), 118701. https://doi.org/10.1103/PhysRevLett.92.118701
Axelrod, R. (1997). The dissemination of culture: A model with local convergence and global polarization. Journal of Conflict Resolution, 41(2), 203–226. https://doi.org/10.1177/0022002797041002001
Pariser, E. (2011). The Filter Bubble: What the Internet Is Hiding from You. New York: Penguin Press.
Dandekar, P., Goel, A., & Lee, D. T. (2013). Biased assimilation, homophily, and the dynamics of polarization. Proceedings of the National Academy of Sciences, 110(15), 5791–5796. https://doi.org/10.1073/pnas.1217220110
Bonabeau, E., Dorigo, M., & Theraulaz, G. (1999). Swarm intelligence: From natural to artificial systems. Oxford University Press.
Goss, S., Aron, S., Deneubourg, J. L., & Pasteels, J. M. (1989). Self-organized shortcuts in the Argentine ant. Naturwissenschaften, 76(12), 579–581. https://doi.org/10.1007/BF00462870
March, J. G. (1991). Exploration and exploitation in organizational learning. Organization Science, 2(1), 71–87. https://doi.org/10.1287/orsc.2.1.71
Sinervo, B., & Lively, C. M. (1996). The rock–paper–scissors game and the evolution of alternative male strategies. Nature, 380(6571), 240–243. https://doi.org/10.1038/380240a0
Epstein, J. M., & Axtell, R. (1996). Growing artificial societies: Social science from the bottom up. Washington, DC: Brookings Institution Press.
Nowak, M. A. (2006). Evolutionary dynamics: Exploring the equations of life. Cambridge, MA: Harvard University Press.
Voter Model on Networks#
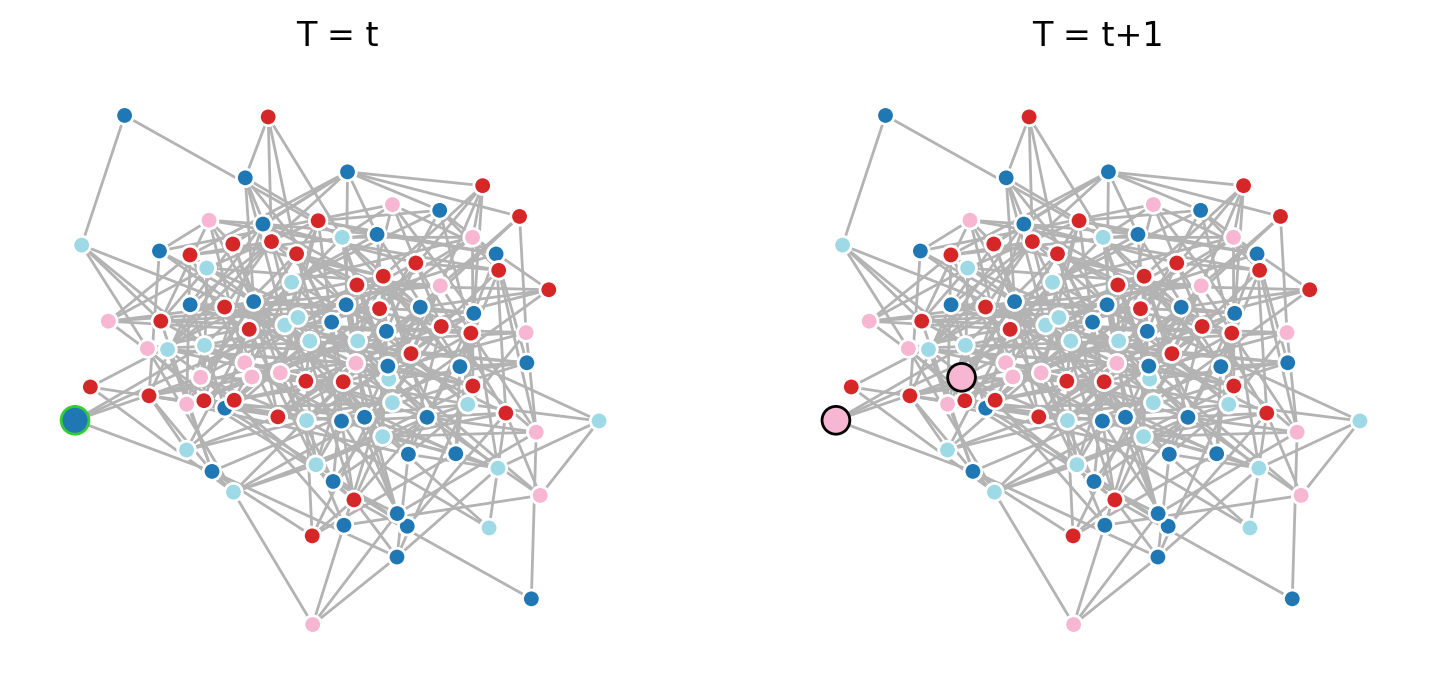
A “voter model” is one of the simplest models of opinion dynamics on networks, which is often used as a way to simulate the spread of opinions, choices, or behaviors through social networks.
The process is quite simple: each agent adopts the state of a randomly chosen neighbor. Again, despite the apparent simplicity of these dynamics, voter models can really demonstrate the importance of network structure and can offer (overly) simplistic insights about consensus formation, polarization, and influence propagation.
Core results in network science:#
Consensus Formation: In finite networks, voter models often lead to global consensus, where all nodes eventually share the same state. The time to reach consensus depends heavily on the network’s topology. For instance, on regular lattices, consensus times scale with system size in \(N\), whereas in small-world or scale-free networks, shortcuts and hub nodes can accelerate consensus.
Role of Network Structire: The structure of the network dramatically influences how quickly and reliably consensus is achieved:
Homogeneous Networks (e.g., regular grids): Local interactions dominate, leading to slower convergence.
Heterogeneous Networks (e.g., scale-free graphs): High-degree nodes act as influencers, spreading states more effectively.
Community Structures: Modular networks may resist global consensus and instead stabilize into local agreement clusters.
Fragmentation and Polarization: In dynamic (i.e., rewiring) networks, voter models can produce fragmentation or stable polarization. These outcomes relate closely to concepts like homophily and echo chambers in social networks.
We’ll start with one “step” in a voter model…#
number_of_opinions = 4
N = 100; p = 0.08
G_er = nx.erdos_renyi_graph(N, p)
init_opinions = dict(zip(G_er.nodes(),
(np.random.choice(list(range(number_of_opinions)),
size=N))))
nx.set_node_attributes(G_er, init_opinions, name='state')
positions = nx.spring_layout(G_er)
fig, ax = plt.subplots(1,1,figsize=(5,5),dpi=100)
nx.draw(G_er, positions, node_size=40, edge_color='.7',
node_color = list(nx.get_node_attributes(G_er,'state').values()),
edgecolors='w',
vmin=0, vmax=number_of_opinions-1, cmap=plt.cm.tab20,ax=ax)
ax.set_title('Node states at time T=0')
plt.show()
# One step of the voter model simulation
fig, ax = plt.subplots(1,2,figsize=(9,4),dpi=200)
# Randomly select a "listener" node from the graph.
# The "listener" is the agent whose state may change in this step.
listener = np.random.choice(G_er.nodes())
nx.draw(G_er, positions, node_size=[40 if i!=listener else 100 for i in G_er.nodes()],
edge_color='.7',
node_color=[G_er.nodes[n]['state'] for n in G_er.nodes()],
edgecolors=['w' if i!=listener else 'limegreen' for i in G_er.nodes()],
vmin=0, vmax=number_of_opinions-1, cmap=plt.cm.tab20, ax=ax[0])
# Check if the "listener" has any neighbors (i.e., it isn't isolated).
# The voter model requires interaction between neighbors, so no update is possible if there are none.
if list(G_er.neighbors(listener)) != []:
# Randomly select a "speaker" node from the neighbors of the "listener."
# The "speaker" is the agent influencing the "listener's" state in this step.
speaker = np.random.choice(list(G_er.neighbors(listener)))
# Update the "listener's" state to match the "speaker's" state.
# This simulates the "listener" adopting the opinion of the "speaker."
G_er.nodes[listener]['state'] = G_er.nodes[speaker]['state']
nx.draw(G_er, positions, node_size=[40 if i not in [listener,speaker] else 100 for i in G_er.nodes()],
edgecolors=['w' if i not in [listener,speaker] else 'k' for i in G_er.nodes()],
edge_color='.7', node_color = [G_er.nodes[n]['state'] for n in G_er.nodes()],
vmin=0, vmax=number_of_opinions-1, cmap=plt.cm.tab20, ax=ax[1])
ax[0].set_title('T = t')
ax[1].set_title('T = t+1')
plt.show()
Your turn!#
Wrap a single “step” into a function.
Create a function that runs T steps, tracking the node states through time.
Write a function that visualizes the evolution of this network toward consensus.
pass
def voter_step(G, var_name='state', p_adopt=1.0):
"""
Executes a single step of the voter model on a graph.
In this step, a randomly selected "listener" node may adopt the state of
a randomly chosen "speaker" node from its neighbors with a probability `p_adopt`.
Args:
G (networkx.Graph): The input graph where nodes have a `var_name` attribute
representing their current state.
var_name (str): The name of the node attribute used for storing opinions or states.
Default is 'state'.
p_adopt (float): The probability that the listener adopts the speaker's state
during an interaction. Default is 1.0 (always adopt).
Returns:
networkx.Graph: The updated graph after one voter model step.
"""
# Randomly select a "listener" node from the graph
listener = np.random.choice(G.nodes())
# Check if the "listener" has any neighbors (skip if isolated)
if list(G.neighbors(listener)) != []:
# Randomly select a "speaker" node from the listener's neighbors
speaker = np.random.choice(list(G.neighbors(listener)))
# With probability p_adopt, the listener adopts the speaker's state
if np.random.rand() < p_adopt:
G.nodes[listener][var_name] = G.nodes[speaker][var_name]
return G
def run_voter_model(G, T, number_of_opinions=4, var_name='state', p_adopt=1.0):
"""
Simulates the voter model on a graph for a specified number of steps.
Each node is initialized with a random opinion (from a predefined number of opinions),
and the voter model is iteratively applied for T time steps. During each step, a randomly
selected node (listener) may adopt the opinion of a randomly chosen neighbor (speaker).
Args:
G (networkx.Graph): The input graph where nodes will hold their state as a `var_name` attribute.
T (int): The number of time steps to simulate.
number_of_opinions (int): The total number of unique opinions to assign initially.
Default is 4.
var_name (str): The name of the node attribute used for storing opinions or states.
Default is 'state'.
p_adopt (float): The probability that a listener adopts the speaker's state
during an interaction. Default is 1.0 (always adopt).
Returns:
tuple:
- networkx.Graph: The graph with final states of nodes after T steps.
- np.ndarray: A 2D array where rows correspond to nodes and columns correspond
to their state over time steps.
"""
# Initialize node states with random opinions
N = G.number_of_nodes()
init_opinions = dict(zip(G.nodes(),
(np.random.choice(list(range(number_of_opinions)),
size=N))))
nx.set_node_attributes(G, init_opinions, name=var_name)
# Create a copy of the graph for tracking opinion evolution
H = G.copy()
opinions_out = np.zeros((N, T))
opinions_out[:, 0] = list(nx.get_node_attributes(G, name=var_name).values())
# Run the voter model for T steps
for t in range(1, T):
G = voter_step(G, var_name, p_adopt)
opinions_out[:, t] = list(nx.get_node_attributes(G, name=var_name).values())
return G, opinions_out
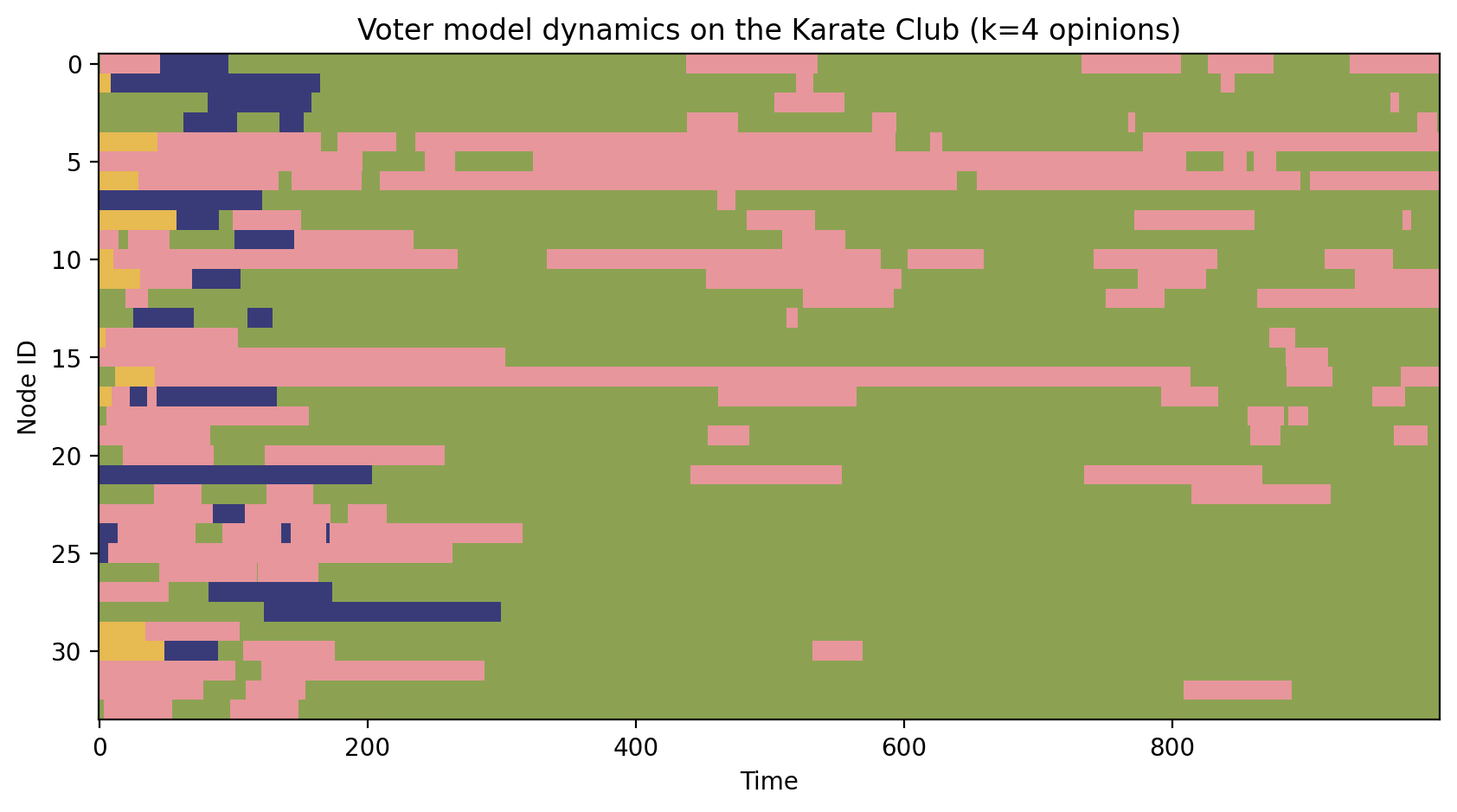
# np.random.seed(4)
N = 100
T = 1000
G = nx.karate_club_graph()
num_opinions = 4
Gx, op = run_voter_model(G,T,num_opinions)
fig, ax = plt.subplots(1,1,figsize=(10,5),dpi=200)
ax.imshow(op, aspect='auto', cmap=plt.cm.tab20b, interpolation='none', vmin=0, vmax=num_opinions)
ax.set_title('Voter model dynamics on the Karate Club (k=%i opinions)'%len(np.unique(op)))
ax.set_xlabel('Time')
ax.set_ylabel('Node ID')
plt.show()
Schelling Model of Segregation#
The Schelling model was a landmark in ABMs, which really well illustrated the way that (slight!!) individual preferences lead to large-scale patterns of segregation. Originally introduced by Thomas Schelling in Dynamic Models of Segregation (1971) and later expanded in his book Micromotives and Macrobehavior (1978), the model captures a critical dynamic: small, individual preferences for neighbors of similar characteristics can lead to dramatic, unintended societal outcomes, such as complete segregation. It is a great example for how systems self-organize and how seemingly benign preferences can amplify into systemic inequalities. It provides a framework for studying not just segregation in housing, but also phenomena like polarization in social networks, opinion clustering, and even ecological niche formation.
While Schelling originally placed agents on a 2D grid, modern adaptations situate agents on network structures, offering new perspectives on segregation dynamics. These adaptations allow researchers to explore:
Topology Effects: How network structures, such as degree distributions, clustering, and community structure, influence segregation outcomes.
Heterogeneity in Preferences: Studying diverse populations with varying satisfaction thresholds to understand robustness and sensitivity of segregation dynamics.
Dynamic Networks: Incorporating adaptive or rewiring mechanisms to capture real-world social and spatial dynamics.
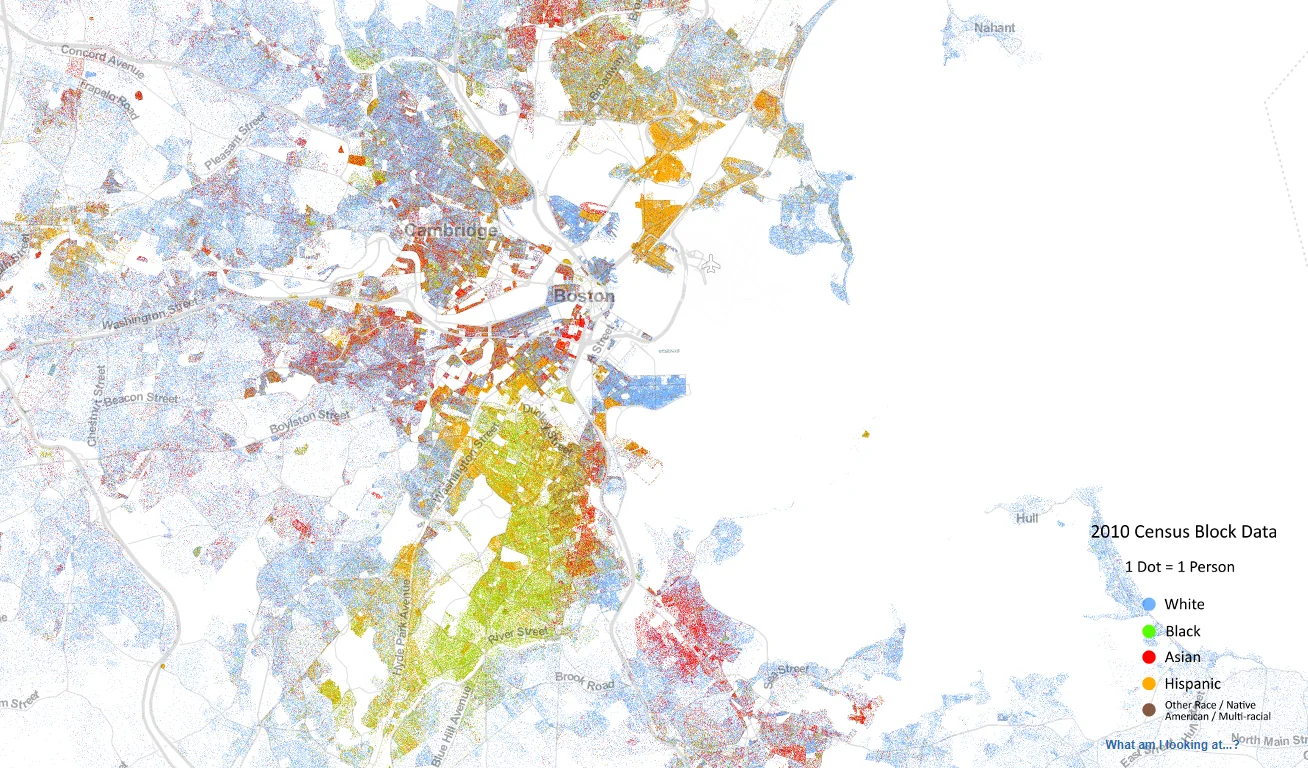
Source: https://demographics.virginia.edu/DotMap/
Some helpful references:
Schelling, T. C. (1971). Dynamic models of segregation. Journal of Mathematical Sociology, 1(2), 143–186. https://doi.org/10.1080/0022250X.1971.9989794
Schelling, T. C. (1978). Micromotives and Macrobehavior. New York: W.W. Norton & Company. https://wwnorton.com/books/Micromotives-and-Macrobehavior/
Fossett, M. (2006). Ethnic preferences, social distance dynamics, and residential segregation: Theoretical explorations using simulation analysis. Journal of Mathematical Sociology, 30(3-4), 185–273. https://doi.org/10.1080/00222500500544052
Pancs, R., & Vriend, N. J. (2007). Schelling’s spatial proximity model of segregation revisited. Journal of Public Economics, 91(1-2), 1–24. https://doi.org/10.1016/j.jpubeco.2006.03.008
Zhang, J. (2004). Residential segregation in an all-integrationist world. Journal of Economic Behavior & Organization, 54(4), 533–550. https://doi.org/10.1016/j.jebo.2003.04.001
Grauwin, S., Goffette-Nagot, F., & Jensen, P. (2012). Dynamic models of residential segregation: An analytical solution. Journal of Public Economics, 96(1-2), 124–141. https://doi.org/10.1016/j.jpubeco.2011.08.011
Bruch, E. E., & Mare, R. D. (2006). Neighborhood choice and neighborhood change. American Journal of Sociology, 112(3), 667–709. https://doi.org/10.1086/507856
Clark, W. A. V. (1991). Residential preferences and neighborhood racial segregation: A test of the Schelling segregation model. Demography, 28(1), 1–19. https://doi.org/10.2307/2061333
Epstein, J. M., & Axtell, R. (1996). Growing artificial societies: Social science from the bottom up. Washington, DC: Brookings Institution Press. (on Brennan’s desk if you want!)
Implementing the Schelling model on a grid#
Initialize grid (size, number of individuals vs empty space)
Initialize population
Number of categories
Proportion of nodes in each category
Tolerance level: [0.0-1.0], where 0.3 means that nodes need 30% of similar neighbors to be satisfied
# Parameters
width=100; height=100 # Size of the grid
empty_ratio = 0.2 # Percentage of empty spaces
tolerance = 0.3 # Tolerance level (0.3 means 30% similar neighbors needed to be happy)
iterations = 50 # Number of iterations
num_categories = 2
# Initialization
num_empty = int(width * height * empty_ratio)
num_agents = width * height - num_empty
nums_per_group = []
for i in range(num_categories):
nums_per_group.append(num_agents // num_categories)
if num_agents - sum(nums_per_group) > 0:
nums_per_group[-1] += num_agents - sum(nums_per_group)
# Create grid and place agents and empty spaces
grid = np.zeros((width, height))
agent_categories = [0] * num_empty
for ix, num_in_group in enumerate(nums_per_group):
ix += 1
agent_categories = agent_categories + [ix]*num_in_group
agents = np.array(agent_categories)
np.random.shuffle(agents)
grid = agents.reshape((width, height))
import matplotlib.patches as mpatches
category_labels = ['Empty cell', 'Category 1', 'Category 2']
colors = ['w', '#ffcccb', '#add8e6'] # Example colors from the colormap
colors = plt.cm.gist_stern_r(np.linspace(0,1,num_categories+2))
# Create the figure
fig, ax = plt.subplots(1, 1, figsize=(5, 5), dpi=100)
im = ax.imshow(grid, cmap='gist_stern_r', interpolation='none',
vmin=0, vmax=num_categories+1)
# Create legend entries
legend_patches = [mpatches.Patch(color=color, ec='.2', label=label)
for color, label in zip(colors, category_labels)]
ax.legend(handles=legend_patches, loc=2, bbox_to_anchor=[1.0,1.0], fontsize='small')
ax.set_xticks([])
ax.set_yticks([])
ax.set_title('Schelling Model of Segregation (t=0)')
plt.show()
Now that this is initialized, we need functions that:
Evaluate whether a given cell is “satisfied”, and
Move “unsatisfied” individuals to cells that are empty
def is_satisfied(x, y, tolerance=0.3):
"""
Determines whether an agent at position (x, y) is "satisfied" based on its neighborhood.
An agent is considered "satisfied" if the proportion of similar neighbors meets or exceeds
the specified tolerance. Empty cells (value 0) are always "satisfied" since they don't represent an agent.
Args:
x (int): The x-coordinate of the agent in the grid.
y (int): The y-coordinate of the agent in the grid.
tolerance (float): The minimum proportion of similar neighbors required for the agent to be happy.
Must be between 0 and 1.
Returns:
bool: True if the agent is happy, False otherwise.
Notes:
- The function assumes that `grid`, `width`, and `height` are globally defined variables representing
the simulation's state and dimensions.
- An empty cell (value 0) is always considered happy.
- Boundary conditions are handled by ensuring that neighbors outside the grid are excluded.
"""
# Get the agent's value (group or state) at the given position
agent = grid[x, y]
# If the cell is empty (value 0), it is always "satisfied"
if agent == 0:
return True
#### to do: check for n=9 neighbors
# Collect the values of all valid neighbors
neighbors = []
for dx in [-1, 0, 1]: # Iterate over x-offsets
for dy in [-1, 0, 1]: # Iterate over y-offsets
nx, ny = x + dx, y + dy # Calculate neighbor coordinates
# Ensure the neighbor is within the grid bounds and not the agent itself
if 0 <= nx < width and 0 <= ny < height and (dx != 0 or dy != 0):
neighbors.append(grid[nx, ny])
# Count the number of similar and non-empty neighbors
similar_neighbors = sum(1 for n in neighbors if n == agent) # Neighbors with the same state as the agent
total_neighbors = sum(1 for n in neighbors if n != 0) # Neighbors that are not empty cells
# If there are no non-empty neighbors, the agent is considered "satisfied"
if total_neighbors == 0:
return True
# Determine happiness based on the proportion of similar neighbors
return similar_neighbors / total_neighbors >= tolerance
x=20; y=40
import matplotlib.patches as mpatches
category_labels = ['Empty cell', 'Category 1', 'Category 2']
colors = ['w', '#ffcccb', '#add8e6'] # Example colors from the colormap
colors = plt.cm.gist_stern_r(np.linspace(0,1,num_categories+2))
# Create the figure
fig, ax = plt.subplots(1, 1, figsize=(5, 5), dpi=100)
im = ax.imshow(grid, cmap='gist_stern_r', interpolation='none',
vmin=0, vmax=num_categories+1)
ax.scatter([x],[y],marker='s',c=None,ec='orangered',lw=2)
# Create legend entries
legend_patches = [mpatches.Patch(color=color, ec='.2', label=label)
for color, label in zip(colors, category_labels)]
ax.legend(handles=legend_patches, loc=2, bbox_to_anchor=[1.0,1.0], fontsize='small')
ax.text(1.02, 0.50, "Q: Is the individual at (%i,%i) satisfied?"%(x,y),transform=ax.transAxes)
ax.text(1.02, 0.45, "A: %s"%(str(is_satisfied(x,y,tolerance))),transform=ax.transAxes,color='steelblue')
ax.set_xticks([])
ax.set_yticks([])
ax.set_title('Schelling Model of Segregation (t=0)')
plt.show()
x=25; y=34
tol = 0.9
category_labels = ['Empty cell', 'Category 1', 'Category 2']
colors = ['w', '#ffcccb', '#add8e6'] # Example colors from the colormap
colors = plt.cm.gist_stern_r(np.linspace(0,1,num_categories+2))
# Create the figure
fig, ax = plt.subplots(1, 1, figsize=(5, 5), dpi=100)
im = ax.imshow(grid, cmap='gist_stern_r', interpolation='none',
vmin=0, vmax=num_categories+1)
ax.scatter([x],[y],marker='s',c=None,ec='orangered',lw=2)
# Create legend entries
legend_patches = [mpatches.Patch(color=color, ec='.2', label=label)
for color, label in zip(colors, category_labels)]
ax.legend(handles=legend_patches, loc=2, bbox_to_anchor=[1.0,1.0], fontsize='small')
ax.text(1.02, 0.50, "Q: Is the individual at (%i,%i) satisfied?"%(x,y),transform=ax.transAxes)
ax.text(1.02, 0.45, "A: %s"%(str(is_satisfied(x,y,tol))),transform=ax.transAxes,color='purple')
ax.set_xticks([])
ax.set_yticks([])
ax.set_title('Schelling Model of Segregation (t=0)')
plt.show()
def move_unsatisfied_agents(grid, T=100, tolerance=0.3):
"""
Moves unsatisfied agents to random empty spaces in the grid.
Unsatisfied agents are those who do not meet the satisfaction threshold
based on the proportion of similar neighbors. The function shuffles both
unsatisfied agents and empty spaces, then relocates the agents to available spaces.
Args:
grid (np.ndarray): The 2D array representing the current state of the grid.
Values > 0 represent agents, and 0 represents empty spaces.
T (int): The number of iterations to perform.
tolerance (float): The minimum proportion of similar neighbors for an agent to be satisfied.
Returns:
np.ndarray: The updated grid after moving unsatisfied agents.
"""
width = grid.shape[0]
height = grid.shape[1]
for _ in range(T):
unsatisfied_agents = []
empty_spaces = [(x, y) for x in range(width) for y in range(height) if grid[x, y] == 0]
# Identify all unsatisfied agents
for x in range(width):
for y in range(height):
if grid[x, y] != 0 and not is_satisfied(x, y, tolerance):
unsatisfied_agents.append((x, y))
# Shuffle unsatisfied agents and empty spaces for random relocation
np.random.shuffle(unsatisfied_agents)
np.random.shuffle(empty_spaces)
# Move unsatisfied agents to random empty spots
for (x, y), (new_x, new_y) in zip(unsatisfied_agents, empty_spaces):
grid[new_x, new_y], grid[x, y] = grid[x, y], 0
return grid
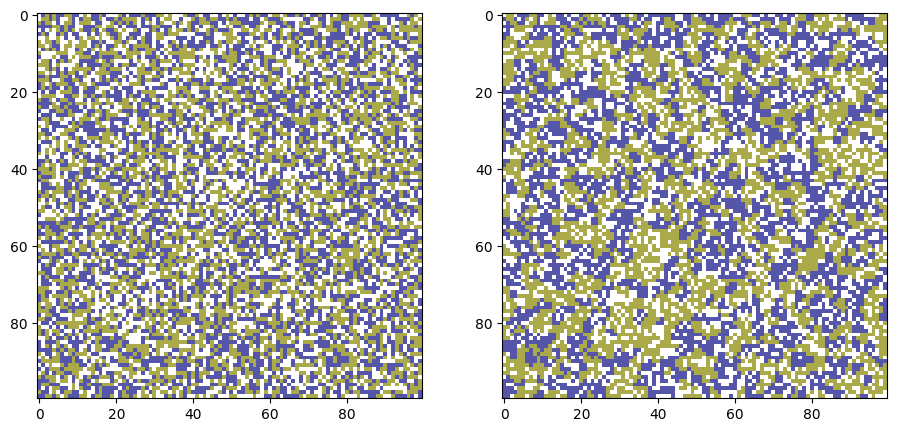
# Parameters
width, height = 100, 100 # Size of the grid
empty_ratio = 0.3 # Percentage of empty spaces
tolerance = 0.3 # Tolerance level (0.3 means 30% similar neighbors needed to be happy)
iterations = 500 # Number of iterations
num_categories = 2
# Initialization
num_empty = int(width * height * empty_ratio)
num_agents = width * height - num_empty
nums_per_group = []
for i in range(num_categories):
nums_per_group.append(num_agents // num_categories)
if num_agents - sum(nums_per_group) > 0:
nums_per_group[-1] += num_agents - sum(nums_per_group)
# Create grid and place agents and empty spaces
grid = np.zeros((width, height))
agent_categories = [0] * num_empty
for ix, num_in_group in enumerate(nums_per_group):
ix += 1
agent_categories = agent_categories + [ix]*num_in_group
agents = np.array(agent_categories)
np.random.shuffle(agents)
grid = agents.reshape((width, height))
grid_0 = grid.copy()
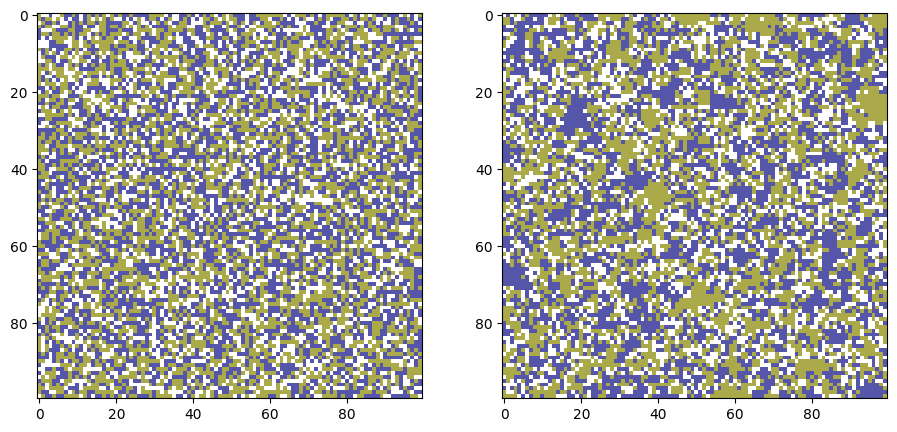
grid_t = move_unsatisfied_agents(grid, T=iterations, tolerance=tolerance)
fig, ax = plt.subplots(1,2,figsize=(11,5),dpi=100)
ax[0].imshow(grid_0, cmap='gist_stern_r', interpolation='none',
vmin=0, vmax=num_categories+1)
ax[1].imshow(grid_t, cmap='gist_stern_r', interpolation='none',
vmin=0, vmax=num_categories+1)
plt.show()
# Parameters
width, height = 100, 100 # Size of the grid
empty_ratio = 0.25 # Percentage of empty spaces
tolerance = 0.8 # Tolerance level (0.3 means 30% similar neighbors needed to be happy)
iterations = 500 # Number of iterations
num_categories = 2
# Initialization
num_empty = int(width * height * empty_ratio)
num_agents = width * height - num_empty
nums_per_group = []
for i in range(num_categories):
nums_per_group.append(num_agents // num_categories)
if num_agents - sum(nums_per_group) > 0:
nums_per_group[-1] += num_agents - sum(nums_per_group)
# Create grid and place agents and empty spaces
grid = np.zeros((width, height))
agent_categories = [0] * num_empty
for ix, num_in_group in enumerate(nums_per_group):
ix += 1
agent_categories = agent_categories + [ix]*num_in_group
agents = np.array(agent_categories)
np.random.shuffle(agents)
grid = agents.reshape((width, height))
grid_0 = grid.copy()
grid_t = move_unsatisfied_agents(grid, T=iterations, tolerance=tolerance)
fig, ax = plt.subplots(1,2,figsize=(11,5),dpi=100)
ax[0].imshow(grid_0, cmap='gist_stern_r', interpolation='none',
vmin=0, vmax=num_categories+1)
ax[1].imshow(grid_t, cmap='gist_stern_r', interpolation='none',
vmin=0, vmax=num_categories+1)
plt.show()
What about a networkx-ified version?#
def initialize_environment(width=100, height=100, empty_ratio=0.3,
num_categories=2, var_name='state'):
"""
Initializes a NetworkX graph-based environment for the Schelling model.
The environment consists of a grid where each node represents a cell that is either:
- Empty (state 0)
- Occupied by an agent from one of the given categories (state > 0)
Agents are distributed randomly, and the number of agents per category is balanced.
Args:
width (int): The width of the grid.
height (int): The height of the grid.
empty_ratio (float): The percentage of cells that are empty (value between 0 and 1).
num_categories (int): The number of agent categories (e.g., groups).
Returns:
networkx.Graph: A 2D grid graph with nodes having a "state" attribute indicating
whether the node is empty or occupied by an agent from a specific category.
"""
# Create the grid graph
G = nx.grid_2d_graph(width, height)
node_pos = list(G.nodes())
node_ids = list(range(G.number_of_nodes()))
G = nx.relabel_nodes(G, dict(zip(node_pos,node_ids)))
nx.set_node_attributes(G, 0, var_name) # Default state for all nodes is 0 (empty)
nx.set_node_attributes(G, dict(zip(node_ids,node_pos)), 'pos')
# Calculate the number of empty cells and agents
num_empty = int(width * height * empty_ratio)
num_agents = width * height - num_empty
# Distribute agents among categories
nums_per_group = [num_agents // num_categories] * num_categories
if num_agents - sum(nums_per_group) > 0:
nums_per_group[-1] += num_agents - sum(nums_per_group)
# Create agent categories and shuffle
agent_categories = [0] * num_empty # Empty spaces
for ix, num_in_group in enumerate(nums_per_group):
agent_categories += [ix + 1] * num_in_group # Agents are 1, 2, ...
np.random.shuffle(agent_categories)
# Assign shuffled agents to the nodes in the grid
for idx, node in enumerate(G.nodes):
G.nodes[node][var_name] = agent_categories[idx]
return G
# Helper function to check satisfaction
def is_satisfied_nx(G, node, tolerance, var_name='state', empty_neighbor=False):
"""
Determines if a node is satisfied based on its neighborhood in the graph.
Args:
G (networkx.Graph): The graph representing the grid.
node (tuple): The node (x, y) in the grid to check.
tolerance (float): The minimum proportion of similar neighbors for the node to be satisfied.
Returns:
bool: True if the node is satisfied, False otherwise.
"""
agent_state = G.nodes[node][var_name]
if agent_state == 0: # Empty nodes are always satisfied
return True
neighbors = list(G.neighbors(node))
similar_neighbors = sum(1 for n in neighbors if G.nodes[n][var_name] == agent_state)
if empty_neighbor:
total_neighbors = sum(1 for n in neighbors if G.nodes[n][var_name] != 0)
if total_neighbors == 0: # If there are no non-empty neighbors
return True
else:
total_neighbors = G.degree(node)
if total_neighbors == 0: # If there are no non-empty neighbors
return False
return similar_neighbors / total_neighbors >= tolerance
# Function to move unsatisfied agents
def move_unsatisfied_agents_nx(G, iterations, tolerance, var_name='state'):
"""
Moves unsatisfied agents to random empty spaces in the graph.
Args:
G (networkx.Graph): The graph representing the grid.
iterations (int): The number of iterations to perform.
tolerance (float): The minimum proportion of similar neighbors for an agent to be satisfied.
Returns:
networkx.Graph: The updated graph after moving unsatisfied agents.
"""
H = G.copy()
out_states = np.zeros((H.number_of_nodes(), iterations))
out_states[:, 0] = list(nx.get_node_attributes(H, name=var_name).values())
for t in range(1,iterations):
unsatisfied_agents = []
empty_spaces = [node for node, data in H.nodes(data=True)
if data[var_name] == 0]
# Identify unsatisfied agents
for node in H.nodes():
if H.nodes[node][var_name] != 0\
and not is_satisfied_nx(H, node, tolerance, var_name):
unsatisfied_agents.append(node)
# Shuffle unsatisfied agents and empty spaces for random relocation
np.random.shuffle(unsatisfied_agents)
np.random.shuffle(empty_spaces)
# Move unsatisfied agents to random empty spots
for agent, empty in zip(unsatisfied_agents, empty_spaces):
H.nodes[empty][var_name] = H.nodes[agent][var_name]
H.nodes[agent][var_name] = 0 # Make the agent's previous location empty
out_states[:, t] = list(nx.get_node_attributes(H, name=var_name).values())
return H, out_states
Let’s explore different Schelling Model builds…#
# Parameters
width, height = 100, 100 # Size of the grid
empty_ratio = 0.25 # Percentage of empty spaces
tolerance = 0.8 # Tolerance level (0.3 means 30% similar neighbors needed to be happy)
iterations = 500 # Number of iterations
num_categories = 2
width = 100; height = 100
empty_ratio = 0.25
tol = 0.5
iterations = 50
num_categories = 2
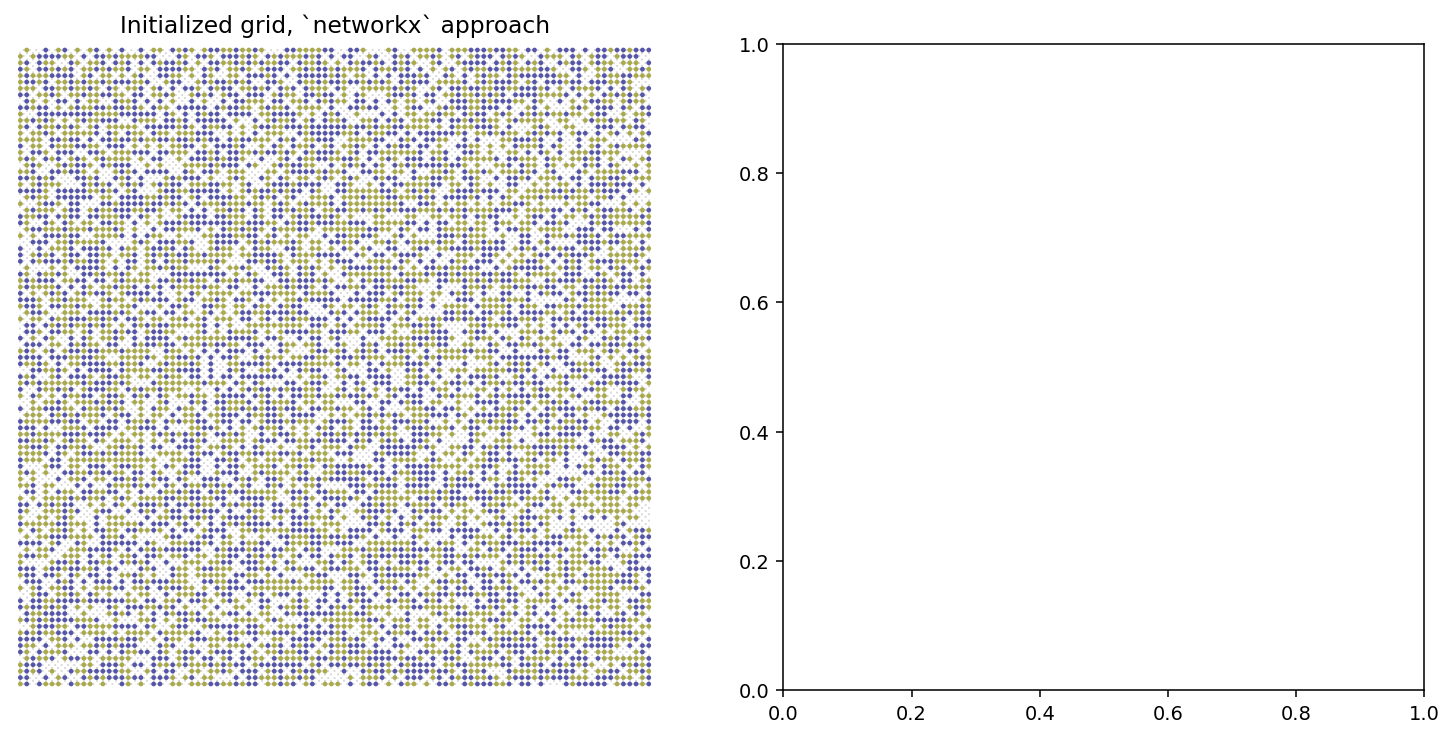
G = initialize_environment(width, height, empty_ratio, num_categories)
pos = nx.get_node_attributes(G, 'pos')
node_colors = list(nx.get_node_attributes(G, 'state').values())
fig, ax = plt.subplots(1,2,figsize=(13,6),dpi=140)
nx.draw_networkx_nodes(G, pos, ax=ax[0], node_size=2, node_color=node_colors,
cmap='gist_stern_r', vmin=0, vmax=num_categories+1)
nx.draw_networkx_edges(G, pos, ax=ax[0], width=0.15)
ax[0].set_xlim(-1,width)
ax[0].set_ylim(-1,height)
ax[0].set_title('Initialized grid, `networkx` approach')
ax[0].set_axis_off()
plt.show()
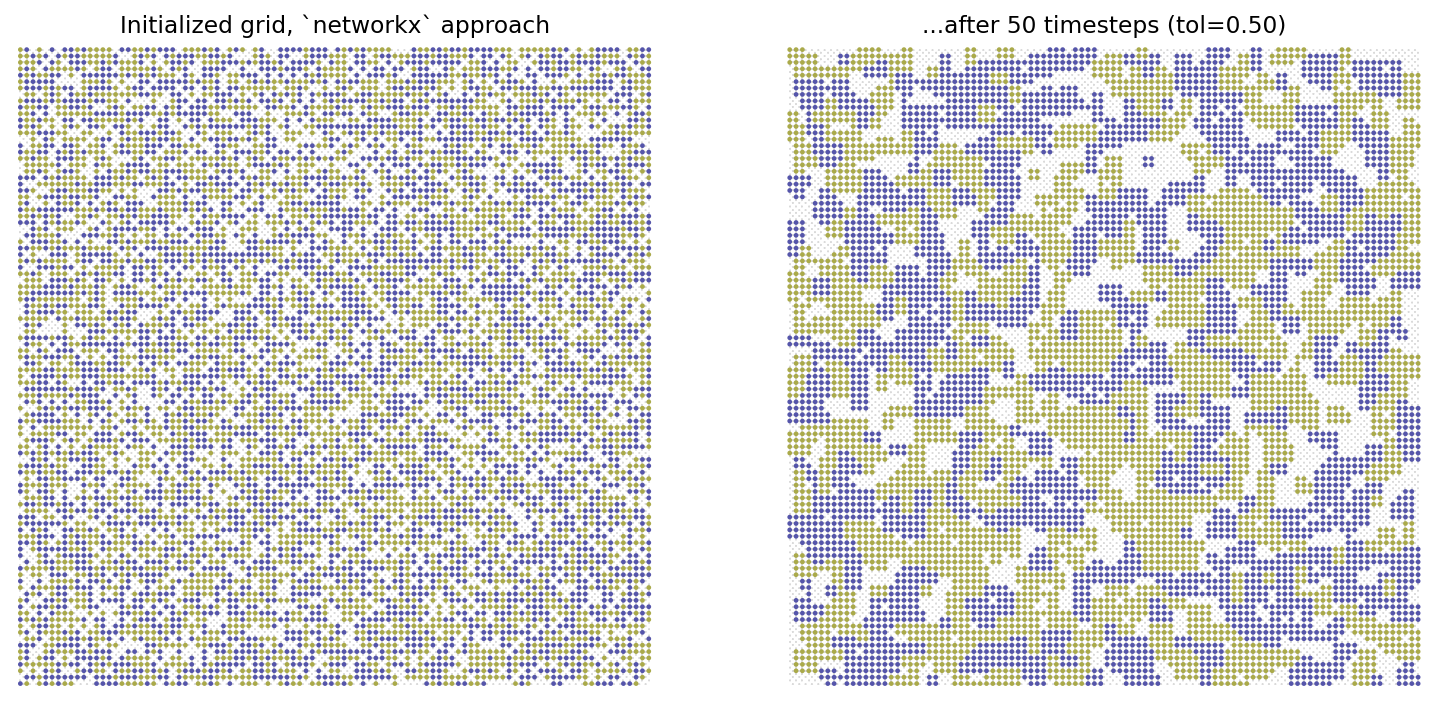
width = 100; height = 100
empty_ratio = 0.2
tol = 0.5
iterations = 50
num_categories = 2
G = initialize_environment(width, height, empty_ratio, num_categories)
pos = nx.get_node_attributes(G, 'pos')
node_colors = list(nx.get_node_attributes(G, 'state').values())
Gt, op = move_unsatisfied_agents_nx(G, iterations, tol, var_name='state')
fig, ax = plt.subplots(1,2,figsize=(13,6),dpi=140)
nx.draw_networkx_nodes(G, pos, ax=ax[0], node_size=2, node_color=node_colors,
cmap='gist_stern_r', vmin=0, vmax=num_categories+1)
nx.draw_networkx_edges(G, pos, ax=ax[0], width=0.15)
ax[0].set_xlim(-1,width)
ax[0].set_ylim(-1,height)
ax[0].set_title('Initialized grid, `networkx` approach')
ax[0].set_axis_off()
node_colors = list(nx.get_node_attributes(Gt, 'state').values())
nx.draw_networkx_nodes(Gt, pos, ax=ax[1], node_size=2, node_color=node_colors,
cmap='gist_stern_r', vmin=0, vmax=num_categories+1)
nx.draw_networkx_edges(Gt, pos, ax=ax[1], width=0.15)
ax[1].set_xlim(-1,width)
ax[1].set_ylim(-1,height)
ax[1].set_title('...after %i timesteps (tol=%.2f)'%(iterations,tol))
ax[1].set_axis_off()
plt.show()
fig, ax = plt.subplots(1,1,figsize=(10,3),dpi=200)
ax.imshow(op,aspect='auto', vmin=0, vmax=3)
plt.show()
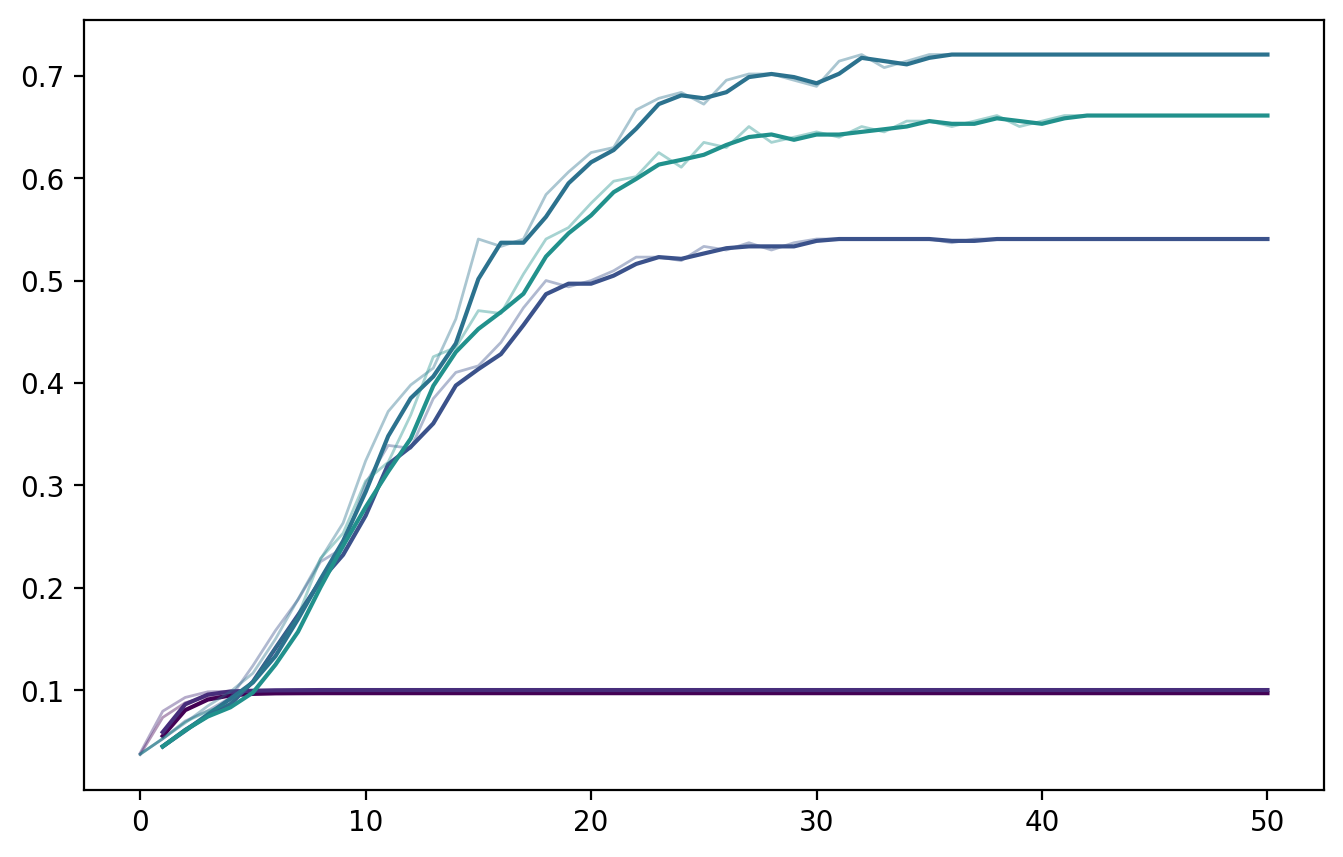
If there’s time: How do we quantify segregation using this?#
width = 100; height = 100
empty_ratio = 0.2
tol = 0.5
iterations = 50
num_categories = 2
fig, ax = plt.subplots(1,1,figsize=(8,5),dpi=200)
tols = np.arange(0.1,1,0.1)
tol_cols = plt.cm.viridis(np.linspace(0,1,len(tols)))
for x,tol in enumerate(tols):
G = initialize_environment(width, height, empty_ratio, num_categories)
Gt, op = move_unsatisfied_agents_nx(G, iterations, tol, var_name='state')
csizes = []
for i in range(op.shape[1]):
Gx = G.copy()
nx.set_node_attributes(Gx, dict(zip(list(Gx.nodes()),op[:,i])), 'state')
nbunch1 = [i[0] for i in Gx.nodes(data=True) if i[1]['state']==1]
csize1 = [len(i) for i in list(nx.connected_components(nx.subgraph(Gx, nbunch=nbunch1)))]
nbunch2 = [i[0] for i in Gx.nodes(data=True) if i[1]['state']==2]
csize2 = [len(i) for i in list(nx.connected_components(nx.subgraph(Gx, nbunch=nbunch2)))]
csizes.append(np.mean(csize1+csize2)/(Gx.number_of_nodes()**0.5))
csizes.append(csizes[-1])
ax.plot(pd.Series(csizes),color=tol_cols[x], alpha=0.4, lw=1)
ax.plot(pd.Series(csizes).rolling(window=2, center=True).mean(),
color=tol_cols[x], label=r'$tol=%.2f$'%tol)
ax.legend(loc=2, bbox_to_anchor=[1.0,1.0], fontsize='small')
ax.set_xlabel('Iterations')
ax.set_ylabel('Average size of within-group\n'+r'connected component (divided by $\sqrt{N}$)')
ax.set_ylim(0)
ax.set_xlim(-1,iterations+1)
ax.grid(lw=1,color='.8',alpha=0.3)
ax.set_title('Quantifying segregation metric 1: Component sizes')
plt.savefig('images/pngs/schelling_segregation_metric1.png',dpi=425,bbox_inches='tight')
plt.savefig('images/pdfs/schelling_segregation_metric1.pdf',bbox_inches='tight')
plt.show()
---------------------------------------------------------------------------
KeyboardInterrupt Traceback (most recent call last)
Cell In[28], line 12
10 for i in range(op.shape[1]):
11 Gx = G.copy()
---> 12 nx.set_node_attributes(Gx, dict(zip(list(Gx.nodes()),op[:,i])), 'state')
14 nbunch1 = [i[0] for i in Gx.nodes(data=True) if i[1]['state']==1]
15 csize1 = [len(i) for i in list(nx.connected_components(nx.subgraph(Gx, nbunch=nbunch1)))]
File <class 'networkx.utils.decorators.argmap'> compilation 17:3, in argmap_set_node_attributes_14(G, values, name, backend, **backend_kwargs)
1 import bz2
2 import collections
----> 3 import gzip
4 import inspect
5 import itertools
File /opt/hostedtoolcache/Python/3.11.13/x64/lib/python3.11/site-packages/networkx/utils/backends.py:535, in _dispatchable._call_if_no_backends_installed(self, backend, *args, **kwargs)
529 if "networkx" not in self.backends:
530 raise NotImplementedError(
531 f"'{self.name}' is not implemented by 'networkx' backend. "
532 "This function is included in NetworkX as an API to dispatch to "
533 "other backends."
534 )
--> 535 return self.orig_func(*args, **kwargs)
File /opt/hostedtoolcache/Python/3.11.13/x64/lib/python3.11/site-packages/networkx/classes/function.py:656, in set_node_attributes(G, values, name)
654 for n, v in values.items():
655 try:
--> 656 G.nodes[n][name] = values[n]
657 except KeyError:
658 pass
File /opt/hostedtoolcache/Python/3.11.13/x64/lib/python3.11/site-packages/networkx/classes/reportviews.py:190, in NodeView.__getitem__(self, n)
187 def __iter__(self):
188 return iter(self._nodes)
--> 190 def __getitem__(self, n):
191 if isinstance(n, slice):
192 raise nx.NetworkXError(
193 f"{type(self).__name__} does not support slicing, "
194 f"try list(G.nodes)[{n.start}:{n.stop}:{n.step}]"
195 )
KeyboardInterrupt:
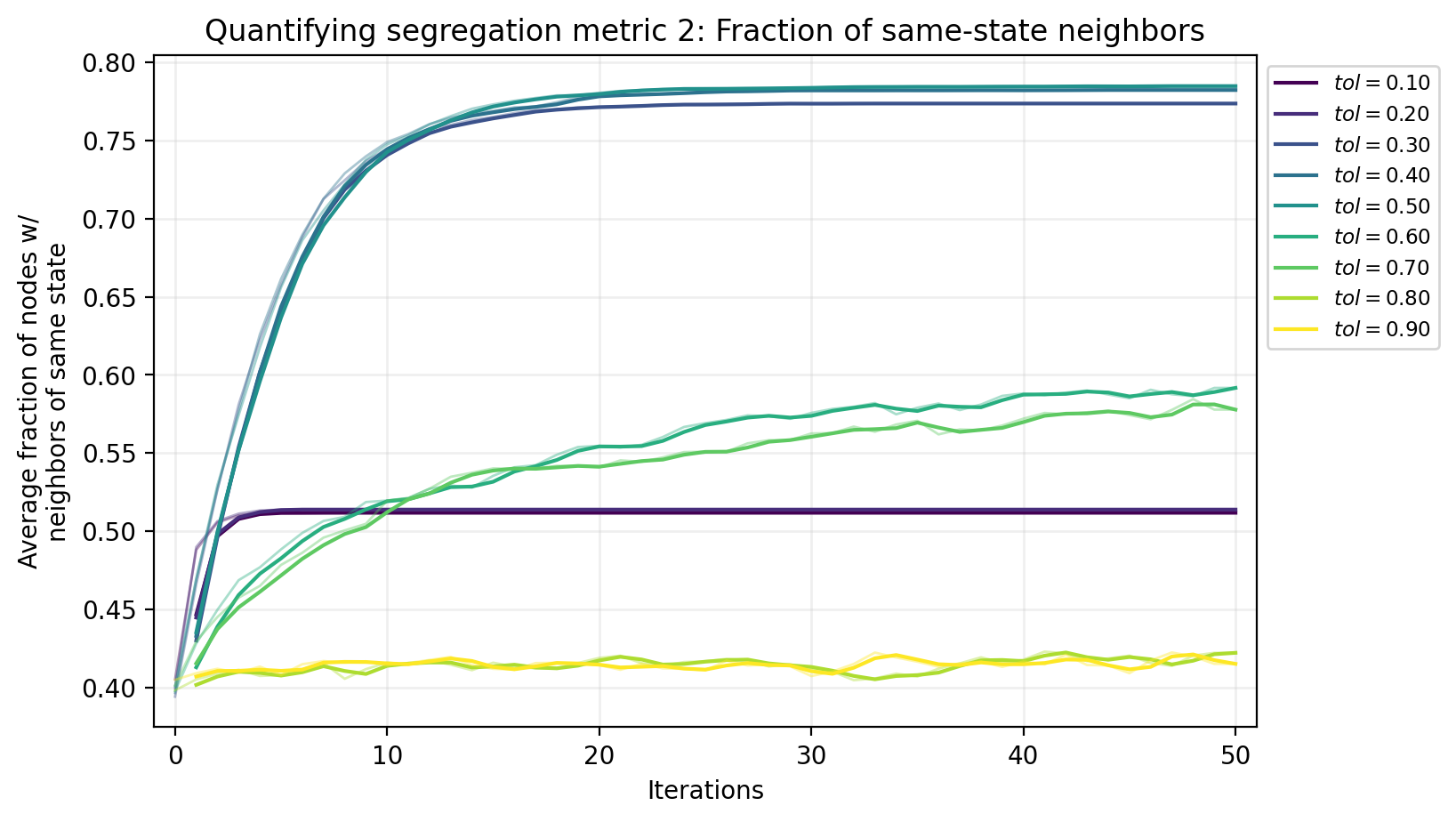
fig, ax = plt.subplots(1,1,figsize=(8,5),dpi=200)
tols = np.arange(0.1,1,0.1)
tol_cols = plt.cm.viridis(np.linspace(0,1,len(tols)))
for x,tol in enumerate(tols):
G = initialize_environment(width, height, empty_ratio, num_categories)
Gt, op = move_unsatisfied_agents_nx(G, iterations, tol, var_name='state')
fracs_out = []
for i in range(op.shape[1]):
Gx = G.copy()
nx.set_node_attributes(Gx, dict(zip(list(Gx.nodes()),op[:,i])), 'state')
fracs = []
for ix, node in enumerate(Gx.nodes()):
node_state_i = op[:,i][node]
if node_state_i > 0:
node_neighbors = list(Gx.neighbors(node))
neighbor_states = [op[:,i][nei] for nei in node_neighbors]
same_neis = sum([1 for i in neighbor_states if i==node_state_i])
fracs.append(same_neis/len(neighbor_states))
fracs_out.append(np.mean(fracs))
fracs_out.append(fracs_out[-1])
ax.plot(pd.Series(fracs_out),color=tol_cols[x], alpha=0.4, lw=1)
ax.plot(pd.Series(fracs_out).rolling(window=2, center=True).mean(),
color=tol_cols[x], label=r'$tol=%.2f$'%tol)
ax.legend(loc=2, bbox_to_anchor=[1.0,1.0], fontsize='small')
ax.set_xlabel('Iterations')
ax.set_ylabel('Average fraction of nodes w/\nneighbors of same state')
ax.set_xlim(-1,iterations+1)
ax.grid(lw=1,color='.8',alpha=0.3)
ax.set_title('Quantifying segregation metric 2: Fraction of same-state neighbors')
plt.savefig('images/pngs/schelling_segregation_metric2.png',dpi=425,bbox_inches='tight')
plt.savefig('images/pdfs/schelling_segregation_metric2.pdf',bbox_inches='tight')
plt.show()
Next time…#
Big Data 2 - Scalability class_19_bigdata2.ipynb
References and further resources:#
Class Webpages
Jupyter Book: https://asmithh.github.io/network-science-data-book/intro.html
Syllabus and course details: https://brennanklein.com/phys7332-fall24
Clifford, P., & Sudbury, A. (1973). A model for spatial conflict. Biometrika, 60(3), 581–588. https://doi.org/10.1093/biomet/60.3.581
Holley, R. A., & Liggett, T. M. (1975). Ergodic theorems for weakly interacting infinite systems and the voter model. Annals of Probability, 3(4), 643–663. https://doi.org/10.1214/aop/1176996306
DeGroot, M. H. (1974). Reaching a consensus. Journal of the American Statistical Association, 69(345), 118–121. https://doi.org/10.2307/2285509
Hegselmann, R., & Krause, U. (2002). Opinion dynamics and bounded confidence: Models, analysis, and simulation. Journal of Artificial Societies and Social Simulation, 5(3), 1–24. http://jasss.soc.surrey.ac.uk/5/3/2.html
Daley, D. J., & Kendall, D. G. (1965). Stochastic rumours. Journal of the Institute of Mathematics and Its Applications, 1(1), 42–55. https://doi.org/10.1093/imamat/1.1.42
Nowak, M. A., & May, R. M. (1992). Evolutionary games and spatial chaos. Nature, 359(6398), 826–829. https://doi.org/10.1038/359826a0
Santos, F. C., & Pacheco, J. M. (2005). Scale-free networks provide a unifying framework for the emergence of cooperation. Physical Review Letters, 95(9), 098104. https://doi.org/10.1103/PhysRevLett.95.098104
Hardin, G. (1968). The tragedy of the commons. Science, 162(3859), 1243–1248. https://doi.org/10.1126/science.162.3859.1243
Perc, M., & Szolnoki, A. (2010). Coevolutionary games—a mini review. BioSystems, 99(2), 109–125. https://doi.org/10.1016/j.biosystems.2009.10.003
Güth, W., Schmittberger, R., & Schwarze, B. (1982). An experimental analysis of ultimatum bargaining. Journal of Economic Behavior & Organization, 3(4), 367–388. https://doi.org/10.1016/0167-2681(82)90011-7
Barthélemy, M. (2011). Spatial networks. Physics Reports, 499(1-3), 1–101. https://doi.org/10.1016/j.physrep.2010.11.002
Noh, J. D., & Rieger, H. (2004). Random walks on complex networks. Physical Review Letters, 92(11), 118701. https://doi.org/10.1103/PhysRevLett.92.118701
Axelrod, R. (1997). The dissemination of culture: A model with local convergence and global polarization. Journal of Conflict Resolution, 41(2), 203–226. https://doi.org/10.1177/0022002797041002001
Pariser, E. (2011). The Filter Bubble: What the Internet Is Hiding from You. New York: Penguin Press.
Dandekar, P., Goel, A., & Lee, D. T. (2013). Biased assimilation, homophily, and the dynamics of polarization. Proceedings of the National Academy of Sciences, 110(15), 5791–5796. https://doi.org/10.1073/pnas.1217220110
Bonabeau, E., Dorigo, M., & Theraulaz, G. (1999). Swarm intelligence: From natural to artificial systems. Oxford University Press.
Goss, S., Aron, S., Deneubourg, J. L., & Pasteels, J. M. (1989). Self-organized shortcuts in the Argentine ant. Naturwissenschaften, 76(12), 579–581. https://doi.org/10.1007/BF00462870
March, J. G. (1991). Exploration and exploitation in organizational learning. Organization Science, 2(1), 71–87. https://doi.org/10.1287/orsc.2.1.71
Sinervo, B., & Lively, C. M. (1996). The rock–paper–scissors game and the evolution of alternative male strategies. Nature, 380(6571), 240–243. https://doi.org/10.1038/380240a0
Epstein, J. M., & Axtell, R. (1996). Growing artificial societies: Social science from the bottom up. Washington, DC: Brookings Institution Press.
Nowak, M. A. (2006). Evolutionary dynamics: Exploring the equations of life. Cambridge, MA: Harvard University Press.
Schelling, T. C. (1971). Dynamic models of segregation. Journal of Mathematical Sociology, 1(2), 143–186. https://doi.org/10.1080/0022250X.1971.9989794
Schelling, T. C. (1978). Micromotives and Macrobehavior. New York: W.W. Norton & Company. https://wwnorton.com/books/Micromotives-and-Macrobehavior/
Fossett, M. (2006). Ethnic preferences, social distance dynamics, and residential segregation: Theoretical explorations using simulation analysis. Journal of Mathematical Sociology, 30(3-4), 185–273. https://doi.org/10.1080/00222500500544052
Pancs, R., & Vriend, N. J. (2007). Schelling’s spatial proximity model of segregation revisited. Journal of Public Economics, 91(1-2), 1–24. https://doi.org/10.1016/j.jpubeco.2006.03.008
Zhang, J. (2004). Residential segregation in an all-integrationist world. Journal of Economic Behavior & Organization, 54(4), 533–550. https://doi.org/10.1016/j.jebo.2003.04.001
Grauwin, S., Goffette-Nagot, F., & Jensen, P. (2012). Dynamic models of residential segregation: An analytical solution. Journal of Public Economics, 96(1-2), 124–141. https://doi.org/10.1016/j.jpubeco.2011.08.011
Bruch, E. E., & Mare, R. D. (2006). Neighborhood choice and neighborhood change. American Journal of Sociology, 112(3), 667–709. https://doi.org/10.1086/507856
Clark, W. A. V. (1991). Residential preferences and neighborhood racial segregation: A test of the Schelling segregation model. Demography, 28(1), 1–19. https://doi.org/10.2307/2061333
Epstein, J. M., & Axtell, R. (1996). Growing artificial societies: Social science from the bottom up. Washington, DC: Brookings Institution Press. (on Brennan’s desk if you want!)